
RoadLAB In-Vehicle Instrumented and Calibrated Sequences
A RoadLAB research sequence folder consists of XML files and RDS files which are used to represent and interpret the data collected by the instrumented car. The number of files will vary with the length of the filming session and the number of cameras used. The XML files contain camera parameters used to calibrate the cameras for use as stereo pairs. The RDS files contain an amalgamation of all the data collected by the system at the time of recording. The RDS file names are auto-generated by the system and consist of sequential 10 digit numbers (with leading zeros). The RDS file contains a header and a data section. The header contains information related to the images and cameras that are used to interpret the data section which contains GPS data, high speed CANbus data and the image data. The documentation on data structures for the sequences is available here.
-
File Header Description
- Width of the image
- Height of the image
- Number of cameras used (number of images in a data frame)
- Serial numbers of the cameras
- Colour format (RGB or grayscale)
- Frame rate (FPS)
-
Data Frame Description
- GPS data: latitude, longitude, altitude, and speed
- High speed CANbus data: 52 CANbus structures containing: ID, Message (2 to 8 bytes of data), DLC (length of message in bytes), Flags, and Time Stamp
-
Image Data
- Bitmap format images (RGB or Grayscale)
- Bitmap format images (RGB or Grayscale)
-
Materials Available
- Synchronized 320 by 240 RGB image sequences of the road
- CANBus data at the time of the recording
- GPS data at the time of the recording
- Intrinsic and extrinsic camera parameters
- Please note that the video sequences are composed of multiple files.
Play the sequences with RoadLAB Sequence Reader (RDS) application available on this page.
-
Sequences
- These sequences were produced by the RoadLAB team on November 16 2010 in the city of London, Ontario, Canada.
The first sequence file (extension rds) with camera parameters is
Sequence - 0 - The next sequences are available separately. The reader application will only read the “rds” files in order. Please place the following files in the same folder as the first sequence file downloaded from above.
- Sequence - 1
- Sequence - 2
- Sequence - 3
- Sequence - 4
- Sequence - 5
- Sequence - 6
- Sequence - 7
- Sequence - 8
- Sequence - 9
- Sequence - 10
- Sequence - 11
- Sequence - 12
- These sequences were produced by the RoadLAB team on November 16 2010 in the city of London, Ontario, Canada.
The first sequence file (extension rds) with camera parameters is
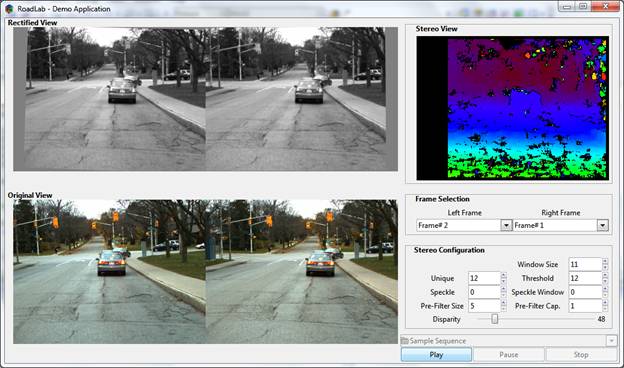
RoadLAB Sequence Reader
-
Features
- Playback for RoadLAB Video Sequence.
- Stereo depth map computation.
- Source code with Visual C++ 2008 Project
- Source code with Eclipse Project (Configured for Linux Debian 5.0)
Requirements
- Visual C++ 2008 Project
- OpenCV 2.2
- Gtkmm Development Environment from http://live.gnome.org/gtkmm/MSWindows
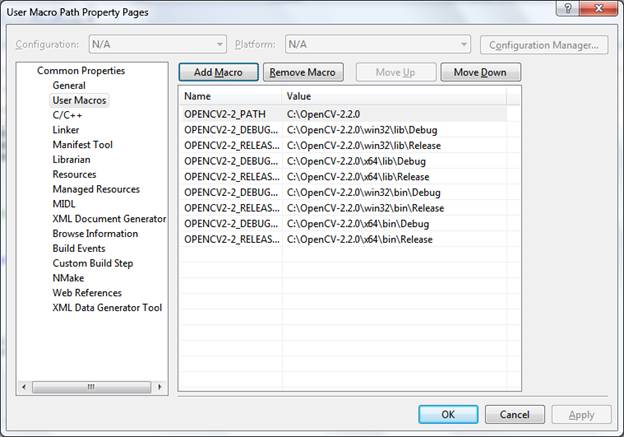
- Additional configuration for OpenCV path is required:
- Open “User Macro Path” Property Sheet in “Property Manager.”
- Select “User Macros” in “Common Properties”
- Set proper paths for all macros starts with OPENCV2-2_
- Visual C++ 2008 Project
- Eclipse Project
- OpenCV 2.2 or higher
- Gtkmm 2.4 Development files
- Glademm 2.4 Development files
- Note for Ubuntu Users: If you get an error while linking the libraries related with -pthread, please link the libraries manually without "pkg-config"
Documentation
-
Document generated by Doxygen is available here.